SegNet学习及实现
SegNet原论文中比较长,实验比较多,主要是SegNet各种变体,变体之间的比较,FCN的比较等等的实验。这里简单记录一下笔记。
简介
常见的分割方法都是直接将分类的架构直接转为图像分割的结构。虽然效果还不错,但是结果还是较为粗糙,主要原因是最大池化和子采样,降低了特征图的分辨率。然后提出了SegNet,SegNet将低分辨率特征映射为输入分辨率用于像素级分类,这种映射产生对边界精确定位有用的特征。
SegNet设计是用于道路场景理解,需要有几种能力:对于外观建模(建筑、道路),形状(汽车、行人),了解空间联系(上下文)。大多数像素属于一个大的类别,网络必须进行平滑分割,也需要有基于物体的形状进行刻画的能力,不论是小物体还是大物体。因此保留边界信息十分重要。
算法结构: 提出SegNet网络,为encoder和decoder对称的结构的一个网络,最后有一个用于pixel-wise的分类层。
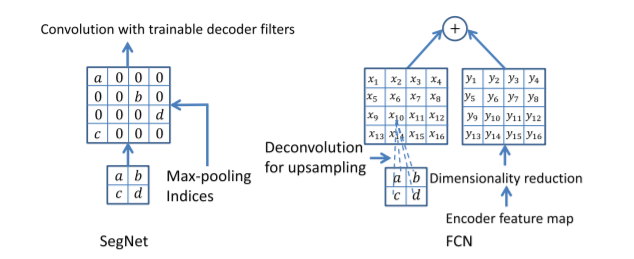
文章亮点: decoder在上采样的时候,直接使用对应encoder中经过max Pool之后保留的池化索引,进行非线性上采样。
比较结果: 通过比较SegNet与FCN,DeepLab-LargeFOV,DeConvNet结构,统筹内存与准确率,SegNet实现了很好的分割效果。
网络结构
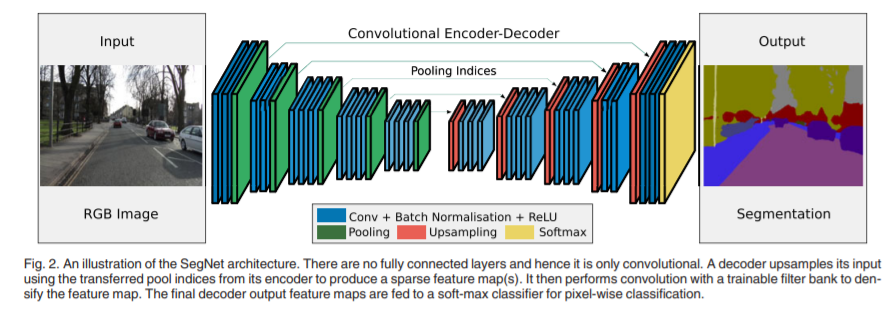
整个SegNet是一个对称结构,一个Encoder对应一个Decoder。许多分割网络都是下采样阶段都是使用的经典的分类网络,不同的只是编码器部分。
编码器结构
SegNet的编码部分和VGG16是相同的,使用了VGG16的前13层,移除了全连接层,由于移除了全连接,参数量减少,更易于训练。
解码器结构
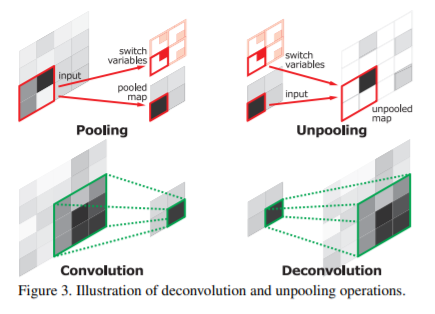
解码器是关键部分,每一层网络都对应一层encoder,也就是13层,最后再加一层分类层。这里上采样使用了反池化,反池化就是池化的时候保存一个池化索引,反池化的时候将索引和输入图传入,将输入图还原到对应位置进行反池化。
反池化的几个优势:
- 提高边界刻画能力
- 在端到端训练减少参数量
- 这种上采样的形式可以组合到任何一种编码解码结构中。
反池化之后,这个过程是不需要学习的。后面在接上卷积层进行学习,将反池化之后的稀疏图变得更加密集。
SegNet和DeconvNet,U-Net的对比
DeconvNet有更大的参数量,需要更多的计算资源,难以进行端到端的训练。主要因为有全连接。
U-Net没有重复使用池化索引,将特征图传到上采样中的,消耗了更多内存。作者认为U-Net较浅,没有SegNet深,效果不如SegNet。
SegNet的几个变体
很多分割架构都是共享相同的编码器网络,只是解码器不同而已。因此使用的VGG16,使用FCN作为比较对象。
SegNet-Basic
这是一个小版本的SegNet,有4个encoder和4个decoder。解码器没有使用Bias和Relu。卷积核改为了7x7,保证感受野足够大。
FCN-Basic
与SegNet-Basic编码器相同,解码器使用FCN的解码。用于对比实验。如上图,SegNet的反池化和FCN的转置卷积的区别。
SegNet-Basic-EncoderAddition
添加了64编码器特征图到每一个对应的输出特征图中,做特征融合。创建一个消耗更多内存的版本。学习的FCN的方式。
FCN-Basic-NoAddition
FCN要求在推理过程中存储特征图,对嵌入式设备不太友好。这里放弃了存储特征,也是用来对比。
SegNet-Basic-SingleChannelDecoder
一种小的变体,解码器的滤波器是单通道的。只对其相应的上采样特征图进行卷积。大大减少了可训练参数的数量和推理时间。结果并不好。
FCN-Basic-NoDim-Reduction
FCN-Basic的变体,没有进行编码器降维操作,不做压缩。
代码
1 | import torch |
结果
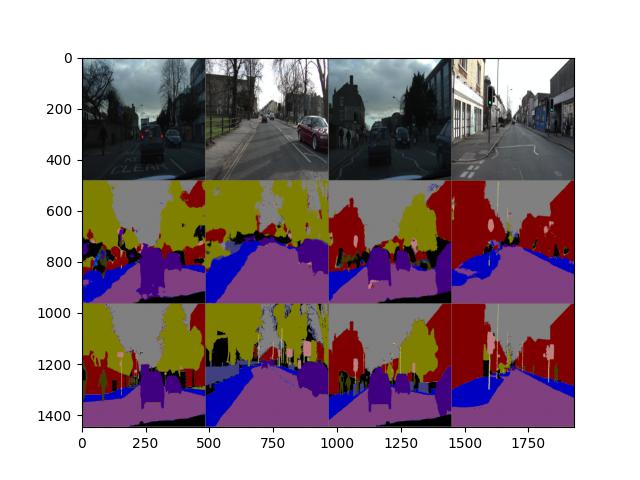
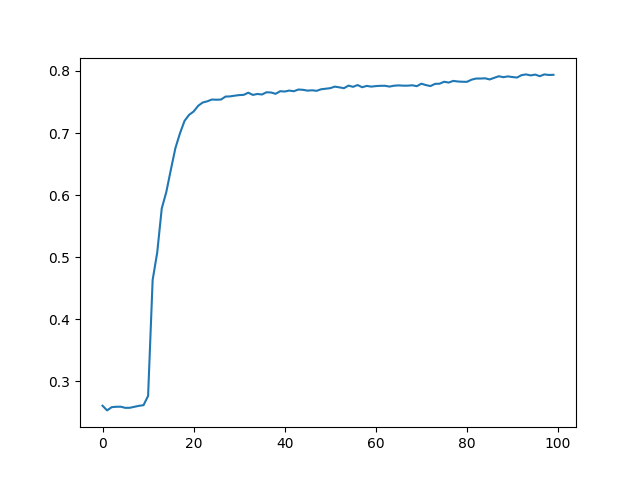
以下是自己跑的结果,优化器使用的Adam,学习率设定5e-6。跑的第197个epoch,以及mean IoU变化图。第一行是原图,第二行是网络输出,第三行是Ground Truth
参考资料
SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation
网络相关视频