本文最后编辑于
参数更新 这里就是将之前的权重更新的算法,封装成一个类。每个类里面都有一个update方法,这样往后如果需要修改更新权重的方法(SGD,Momentum,AdaGrad,Adm),直接更改对应类的对象即可。
e.g
1 2 3 4 5 6 7 8 network = TwoLayersNet(...) optimizer = SGD() ... for i in range (50000 ): ... grads = network.gradient(x_batch,y_batch) params = network.params optimizer.update(params,grads)
SGD 随机梯度下降法,和之前一样,这里只是做了封装
python实现
1 2 3 4 5 6 7 8 import numpy as npclass SGD : def __init__ (self,lr = 0.01 ): self.lr = lr def update (self,params,grads ): for key in params.keys(): params[key] -= self.lr * grads[key]
SGD缺点 SGD的下降方式呈现“之”字形,比较低效。
Momentum 数学表达:
AdaGrad 学习率衰减法: 随着学习进行,学习率逐渐变小,开始多学,后面少学。
数学公式:
python实现
1 2 3 4 5 6 7 8 9 10 11 12 13 14 class AdaGrad : def __init__ (self,lr = 0.01 ): self.lr = lr self.h = None def update (self,params,grads ): if self.h is None : self.h = {} for key,val in params.items(): self.h[key] = np.zeros_like(val) for key in params.keys(): self.h[key] += grads[key] * grads[key] params[key] -= self.lr * grads[key] / (np.sqrt(self.h[key]) + 1e-7 )
Adm 这里具体原理没有详讲,只是贴下代码
python实现
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 class Adam : def __init__ (self, lr=0.001 , beta1=0.9 , beta2=0.999 ): self.lr = lr self.beta1 = beta1 self.beta2 = beta2 self.iter = 0 self.m = None self.v = None def update (self, params, grads ): if self.m is None : self.m, self.v = {}, {} for key, val in params.items(): self.m[key] = np.zeros_like(val) self.v[key] = np.zeros_like(val) self.iter += 1 lr_t = self.lr * np.sqrt(1.0 - self.beta2**self.iter ) / (1.0 - self.beta1**self.iter ) for key in params.keys(): self.m[key] += (1 - self.beta1) * (grads[key] - self.m[key]) self.v[key] += (1 - self.beta2) * (grads[key]**2 - self.v[key]) params[key] -= lr_t * self.m[key] / (np.sqrt(self.v[key]) + 1e-7 )
权重的初始值 权重的初始值设定很重要,这个会导致学习是否会快速进行
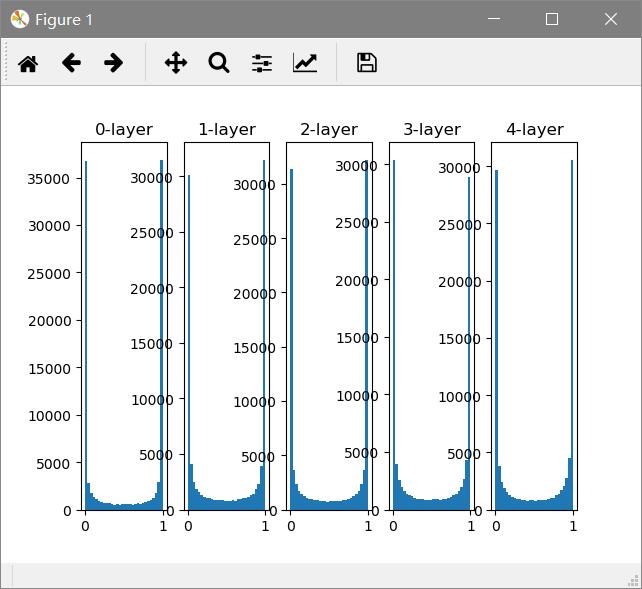
隐藏层的激活值的分布 假设这里有5层神经网络,激活函数使用sigmoid,传入随机数据,观察分布。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 import numpy as npimport matplotlib.pyplot as pltdef sigmoid (x ): return 1 / (1 + np.exp(-x)) def ReLu (x ): m = (x <= 0 ) x[m] = 0 return x x = np.random.randn(1000 ,100 ) node_num = 100 hidden_layer_size = 5 activations = {} for i in range (hidden_layer_size): if i != 0 : x = activations[i - 1 ] w = np.random.randn(node_num, node_num) * 1 z = np.dot(x,w) a = ReLu(z) activations[i] = a for i, a in activations.items(): plt.subplot(1 ,len (activations),i+1 ) plt.title(str (i) + "-layer" ) plt.hist(a.flatten(), 30 , range =(0 ,1 )) plt.show()
out:
这个代码中主要关注的是权重的尺度,标准差的选择。从图中看,由于是sigmoid函数,随着输出不断靠近0或1,他的导数值逐渐接近0,因此偏向0和1的数据分布会造成反向传播中梯度的值不断变小,最后消失。这个问题就是梯度消失 。层次加深的深度学习中,梯度消失问题会更加严重。
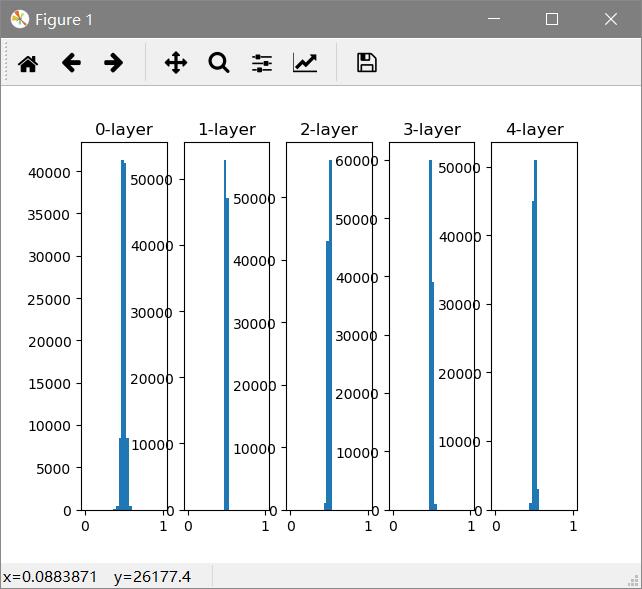
将标准差变为0.01后
1 w = np.random.randn(node_num, node_num) * 0.01
out:
这次呈现集中在0.5分布,不会发生梯度消失问题。激活值的分布有所偏向,在表现力上会有问题,多个神经元输出几乎相同的值,那他们也没有存在的意义了。
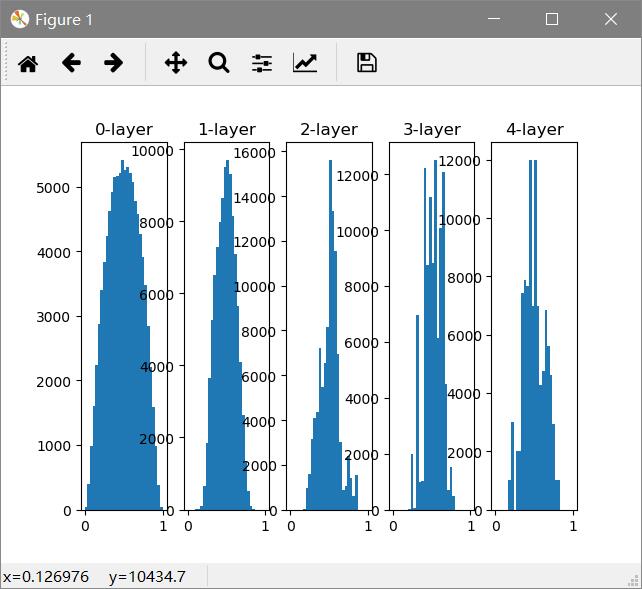
尝试Xavier Glorot推荐的权重初始值:
如果前一层的节点数为n,则初始值使用标准差为1/√n 的分布
从结果可知,越是后面的层,图像变得更歪斜,呈现了比之前更有的广度分布。因为各层间传递的数据有适当的广度,sigmoid表现力不受限制。
ReLu初始值 推荐Kaiming He初始值,也称为“He初始值”,使用标准差为√(2/n)的高斯分布。
Batch Normalization 使用Batch Normalization,使得各层拥有适当的广度,“强制性”的调整各层的激活值分布。
优点:
使得学习更加快速进行
不那么依赖初始值
抑制过拟合
为了有适当的广度,所以需要在神经网络中添加正规化层,就是Batch Normalization层。
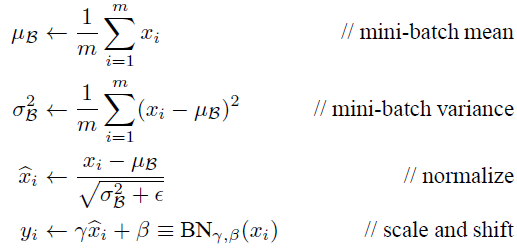
BN层做的事情就是使得数据分布为0、方差为1的正规化。过程如下
这里ε是一个极小值,防止下边变为0导致计算错误。
此处γ的值初始值为1,β值为0,后续通过学习调整到合适的值。
python实现:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 class BatchNormalization : """ http://arxiv.org/abs/1502.03167 """ def __init__ (self, gamma, beta, momentum=0.9 , running_mean=None , running_var=None ): self.gamma = gamma self.beta = beta self.momentum = momentum self.input_shape = None self.running_mean = running_mean self.running_var = running_var self.batch_size = None self.xc = None self.std = None self.dgamma = None self.dbeta = None def forward (self, x, train_flg=True ): self.input_shape = x.shape if x.ndim != 2 : N, C, H, W = x.shape x = x.reshape(N, -1 ) out = self.__forward(x, train_flg) return out.reshape(*self.input_shape) def __forward (self, x, train_flg ): if self.running_mean is None : N, D = x.shape self.running_mean = np.zeros(D) self.running_var = np.zeros(D) if train_flg: mu = x.mean(axis=0 ) xc = x - mu var = np.mean(xc**2 , axis=0 ) std = np.sqrt(var + 10e-7 ) xn = xc / std self.batch_size = x.shape[0 ] self.xc = xc self.xn = xn self.std = std self.running_mean = self.momentum * self.running_mean + (1 -self.momentum) * mu self.running_var = self.momentum * self.running_var + (1 -self.momentum) * var else : xc = x - self.running_mean xn = xc / ((np.sqrt(self.running_var + 10e-7 ))) out = self.gamma * xn + self.beta return out def backward (self, dout ): if dout.ndim != 2 : N, C, H, W = dout.shape dout = dout.reshape(N, -1 ) dx = self.__backward(dout) dx = dx.reshape(*self.input_shape) return dx def __backward (self, dout ): dbeta = dout.sum (axis=0 ) dgamma = np.sum (self.xn * dout, axis=0 ) dxn = self.gamma * dout dxc = dxn / self.std dstd = -np.sum ((dxn * self.xc) / (self.std * self.std), axis=0 ) dvar = 0.5 * dstd / self.std dxc += (2.0 / self.batch_size) * self.xc * dvar dmu = np.sum (dxc, axis=0 ) dx = dxc - dmu / self.batch_size self.dgamma = dgamma self.dbeta = dbeta return dx